





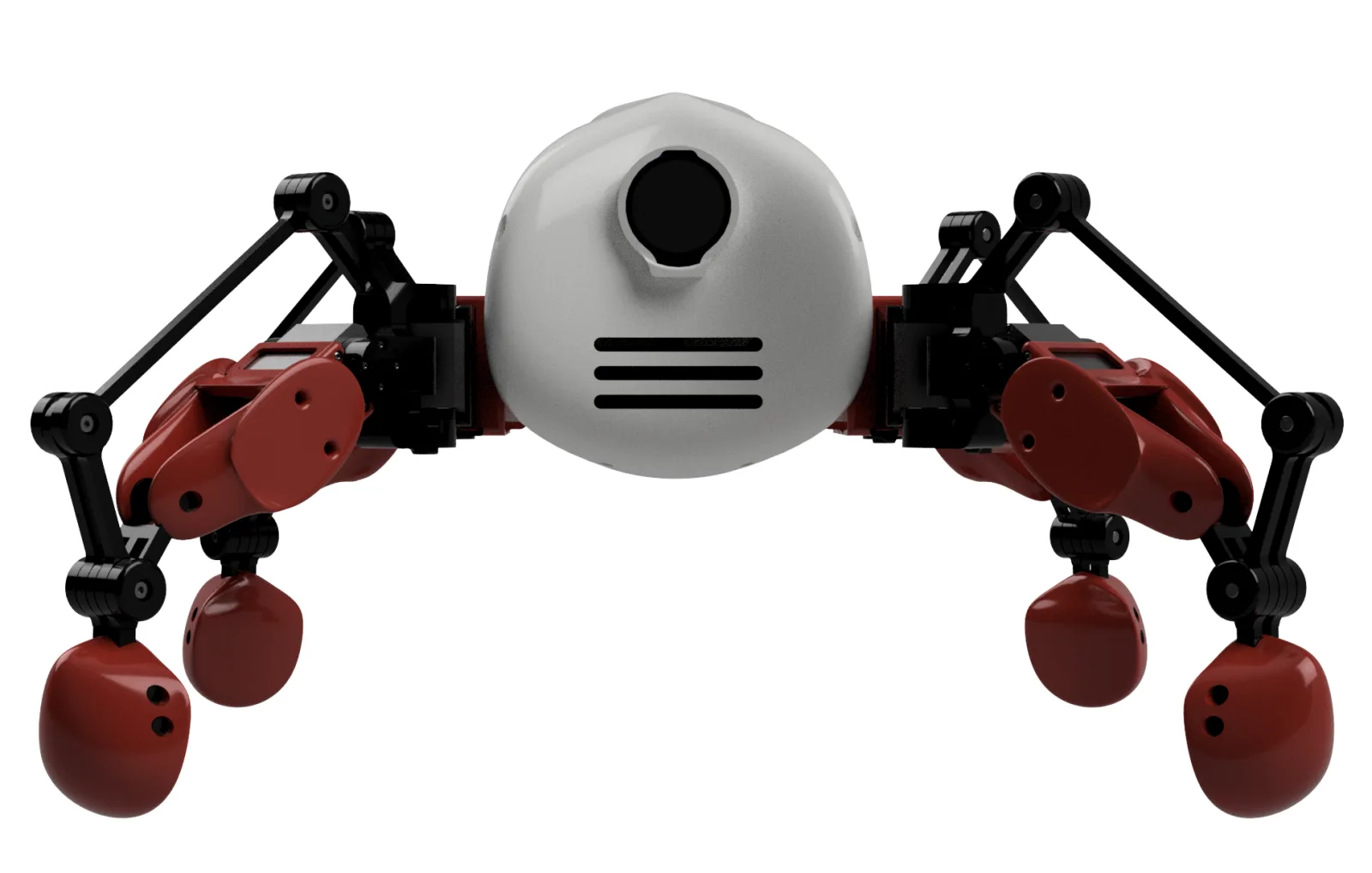








Tobias
A quadrupedal robot that learns to walk through reinforcement learning, from CAD to simulation to real hardware.
Overview
Tobias is a quadrupedal robot project that integrates CAD design, physics simulation, and reinforcement learning to achieve stable walking gaits and straight-line locomotion. By combining RL techniques with detailed physical modeling, it became a platform for exploring autonomous robot movement and control.
Key features
- End-to-end integration pipeline from CAD design to physical deployment using Fusion 360 and PyBullet
- Comparison of DQN and SAC reinforcement learning algorithms for optimal gait learning
- Custom controller class for precise joint movement and physical constraint management
- Successful sim-to-real transfer through both closed-loop IMU-based control and action replay
Technical details
Learning system
- SAC with entropy-based exploration and automatic temperature tuning
- 28-dimensional state space capturing position, orientation, velocities, and joint angles
- Continuous 8-dimensional action space controlling joint angles (two per leg)
- Multi-component reward shaping for stability and efficiency
Architecture & implementation
- Dual actor-critic networks with 256-neuron hidden layers and ReLU activation
- Custom controller class handling joint constraints and gear ratios
- PyBullet physics engine for real-time simulation
- URDF robot model generated from a Fusion 360 CAD design
Results & impact
The SAC implementation significantly outperformed both DQN and traditional approaches. The action-replay method proved particularly effective for sim-to-real transfer, producing stable walking gaits in real-world conditions. The framework provides a foundation for future work in quadrupedal robotics and embodied reinforcement learning.